-
-

Trial Runs
-

Initial Assembly
-

Finishing off Enclosures
-

Detecting User Input
-

Path Planning
-

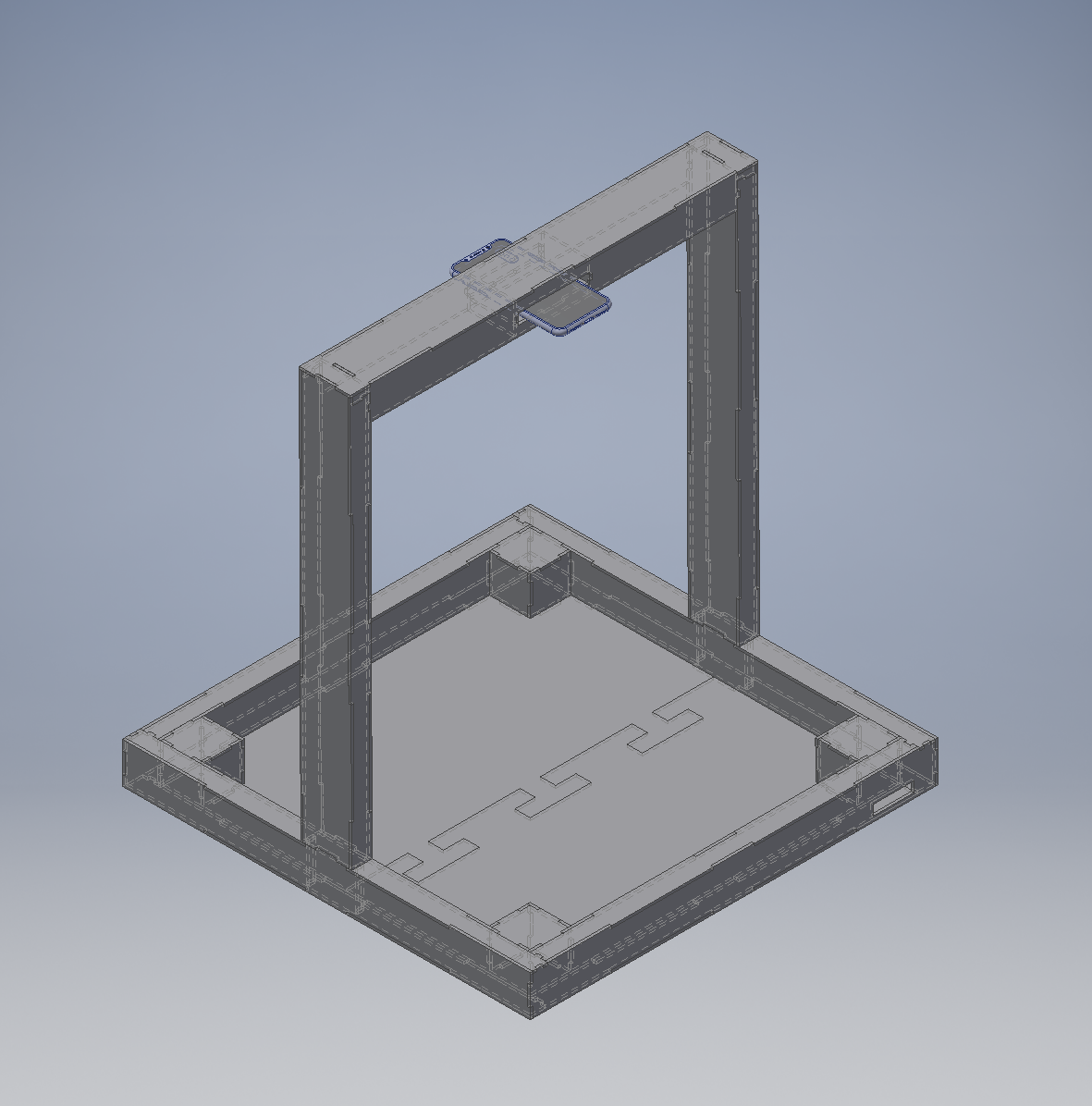
Solid CAD of Field
-

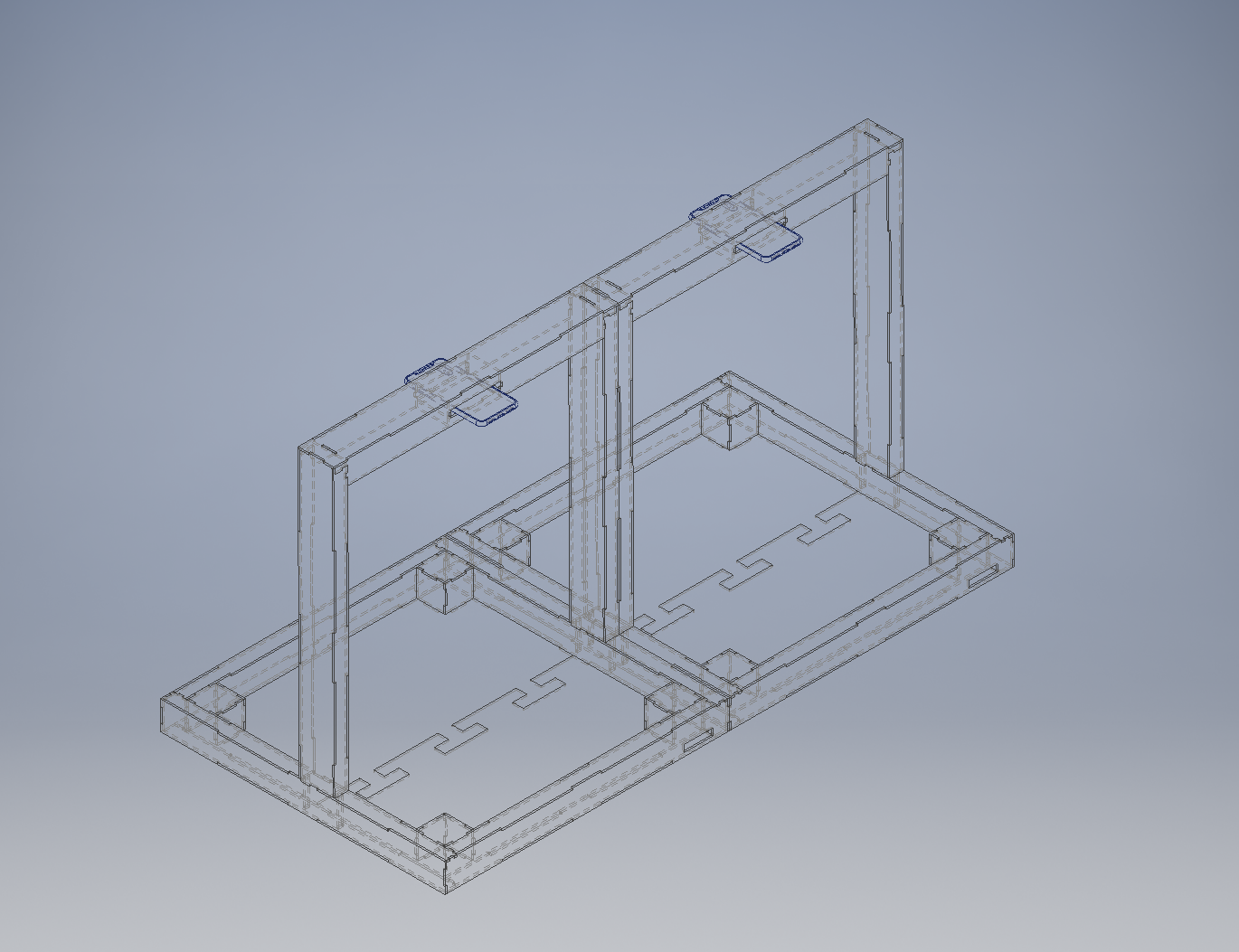
Every CAD Piece Fully Assembled
-

CADding up the field
-

The Complete Technology Stack







Inspiration
At companies that want to introduce automation into their pipeline, finding the right robot, the cost of a specialized robotics system, and the time it takes to program a specialized robot is very expensive. We looked for solutions in general purpose robotics and imagining how these types of systems can be "trained" for certain tasks and "learn" to become a specialized robot.
What it does
The Simon System consists of Simon, our robot that learns to perform the human's input actions. There are two "play" fields, one for the human to perform actions and the other for Simon to reproduce actions. Everything starts with a human action. The Simon System detects human motion and records what happens. Then those actions are interpreted into actions that Simon can take. Then Simon performs those actions in the second play field, making sure to plan efficient paths taking into consideration that it is a robot in the field.
How we built it
Hardware
The hardware was really built from the ground up. We CADded the entire model of the two play fields as well as the arches that hold the smartphone cameras here at PennApps. The assembly of the two play fields consist of 100 individual CAD models and took over three hours to fully assemble, making full utilization of lap joints and mechanical advantage to create a structurally sound system. The LEDs in the enclosure communicate with the offboard field controllers using Unix Domain Sockets that simulate a serial port to allow color change for giving a user info on what the state of the fields is. Simon, the robot, was also constructed completely from scratch. At its core, Simon is an Arduino Nano. It utilizes a dual H Bridge motor driver for controlling its two powered wheels and an IMU for its feedback controls system. It uses a MOSFET for controlling the electromagnet onboard for "grabbing" and "releasing" the cubes that it manipulates. With all of that, the entire motion planning library for Simon was written entirely from scratch. Simon uses a bluetooth module for communicating offboard with the path planning server.
Software
There are four major software systems in this project. The path planning system uses a modified BFS algorithm taking into account path smoothing with realtime updates from the low-level controls to calibrate path plan throughout execution. The computer vision systems intelligently detect when updates are made to the human control field and acquire normalized grid size of the play field using QR boundaries to create a virtual enclosure. The cv system also determines the orientation of Simon on the field as it travels around. Servers and clients are also instantiated on every part of the stack for communicating with low latency.
Challenges we ran into
Lack of acrylic for completing the system, so we had to refactor a lot of our hardware designs to accomodate. Robot rotation calibration and path planning due to very small inconsistencies in low level controllers. Building many things from scratch without using public libraries because they aren't specialized enough. Dealing with smartphone cameras for CV and figuring out how to coordinate across phones with similar aspect ratios and not similar resolutions. The programs we used don't run on windows such as Unix Domain Sockets so we had to switch to using a Mac as our main system.
Accomplishments that we're proud of
This thing works, somehow. We wrote modular code this hackathon and a solid running github repo that was utilized.
What we learned
We got better at CV. First real CV hackathon.
What's next for The Simon System
More robustness.





Log in or sign up for Devpost to join the conversation.