-
-

Intel Curie Based Wireless Sensor Network System Demo
-

IMU Sensor Node
-

Sensor Node
-

Central Node
-

Display Node
-

Arduino 101 in Central Node
-

IMU Node Internals
-

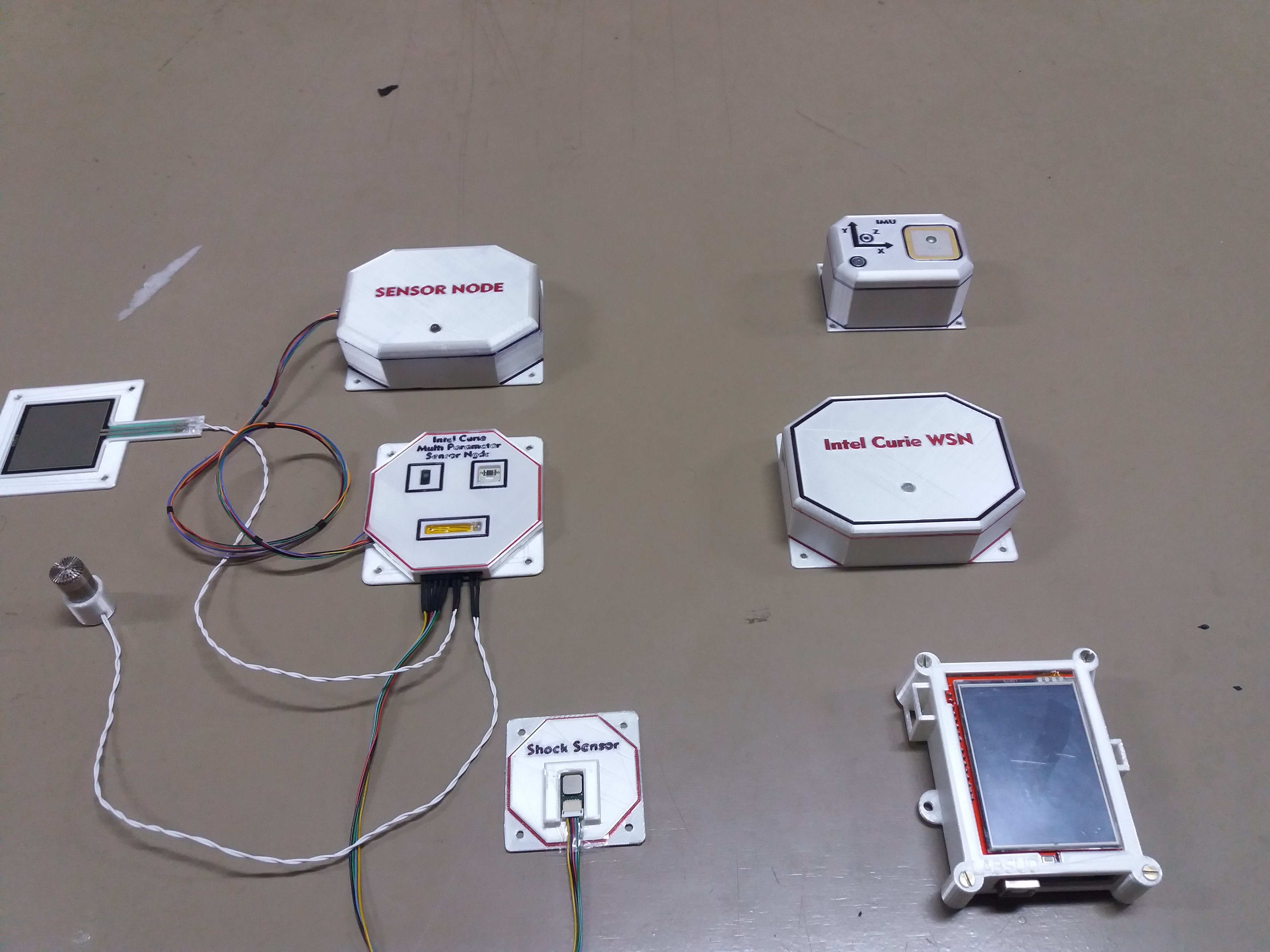
Integrated System Test
-

Actuator Node







Intel Curie based wireless sensor network
Introduction
Rockets are an engineering marvel in human history. It is a group of various subsystems. It is very prone to accidents. So it need very close monitoring of these subsystems.For that, typically about 2500+ individual transducers are distributed throughout the rocket. These sensors, subsystems and harness weighs about 50 Kg, involves huge amount of skilled labour, time for testing etc…
Limitation of Existing System
Advantages of Proposed System
Intel Curie WSN : Overview
Intel Curie Based :
IMU (Inertial Measurement Unit) Node
Sensor Node
▪ An Acoustic Pick-up sensor ▪ A Strain-gauge based on FSR ( Force Sensitive resistor ) ▪ A high precision Shock sensor
Actuator Node
Actuator Node is built around an Arduino-101 with two Servo motor based linear actuators. Both actuators are attached to the Nozzle for Thrust vector Controlling and thus forming an Engine Gimbal Control. Actuator has a BLE Service and its characteristics can be written from central node.
Central Node
Central Node handles the task of data acquisition from all sensor nodes and is also responsible for updating the actuator node variables. The Central node also has the capability to analyse the incoming data for any errors.The Nodes work on the concept of publish/subscribe model. Each Sensor node & actuator node has a BLE service and associated characteristics which can be read or written into.All nodes will be in the advertisement mode initially.Central node connects to each nodes sequentially and will read / write the required services & characteristics.
Storage & Display Node
Storage & Display Node does the task of receiving the data from central node via a UART link and It stores the data in a micro-SD based card and uses the On-board TFT display to show the parameters and connection status in near real time.
What it does
Altogether It does the Task of remote multi-parameter monitoring and control in a launch vehicle/satellite scenario without the need of bulky harness and has a huge impact by the reduction of amount of effort & time involved in assembly and integration of launch vehicles / satellites
How we built it
Rapid prototyping Techniques such as 3D printing is used extensively in the development of Prototypes. Initially all circuits are designed and tested in breadboards before final integration. NRF Connect App is used to verify the Sensor Nodes Services and Characteristics UUIDs.
Challenges we ran into
Design and development of the demo model of the linear actuator for Thrust Vector Controlling as it involves complex mechanical assembly and linkages
Accomplishments that I'm proud of
Within the time bound we are able complete a functional prototype of the idea conceived by us and we successfully incorporated the Intel Curie Chip for our project
What we learned
We learned a lot by working on a real-world project and all the members of team has the spirit of learning by doing.
What's next for Curie Wireless Sensor Network
Built With
- 2.4-inch-serial-lcd-display-with-storage
- 3d-printing
- arduino-101
- avionics
- broadcom-wiced-sense-kit
- cubesat
- embedded-c
- gps
- intel-curie
- intel-edison
- launch-vehicle-technology
- magnetometer
- sensor-interfacing
- servo-motors








Log in or sign up for Devpost to join the conversation.